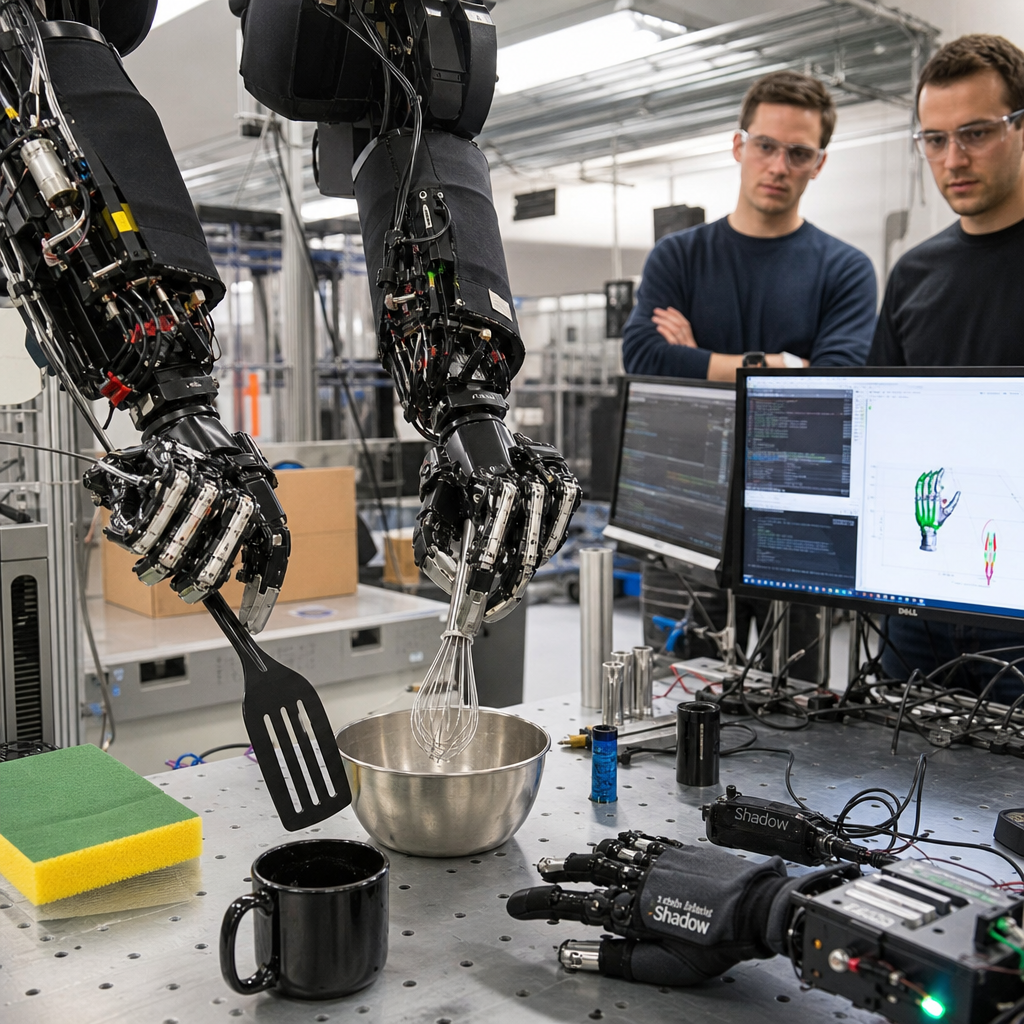
Genesis AI 这次最吸睛的画面,是一只机器人手打鸡蛋、切番茄、弹琴、拧魔方。
但这支视频真正反常的地方,不在魔方。Genesis 原本讲的是“机器人基础模型”,现在却把一只接近人手尺寸和形态的机械手推到台前。
模型公司开始自己造手。这比演示里的花活更有信息量。
GENE-26.5 是首秀,那只手才是重点
Genesis AI 发布了首个模型 GENE-26.5。名字里的 26.5,对应 2026 年 5 月。创始人称后续会快速迭代。
这家公司融资很猛。2025 年,它拿到 1.05 亿美元种子轮融资,由 Eclipse 和 Khosla Ventures 共同领投,投资人包括 Eric Schmidt 等。
它原本很容易被放进 Physical Intelligence、Skild AI 那一类:做机器人基础模型,试图让机器学会更通用的物理操作。
但 Genesis 这次往前多走了一步:不只发模型,还自研仿人机械手。
| 项目 | 已知事实 | 该怎么看 |
|---|---|---|
| 模型 | GENE-26.5,首个版本 | 目前没有公开基准,不能直接神化通用能力 |
| 硬件 | 自研仿人机械手,接近人手尺寸和形态 | 目标是缩小 embodiment gap |
| 演示 | 做饭、弹琴、魔方、实验室操作 | 演示不等于部署,失败率未知 |
| 路线 | 从模型走向软硬件全栈 | 数据闭环更强,成本和组织复杂度也更高 |
所谓 embodiment gap,可以粗暴理解为:人手做出来的数据,机器人未必能直接学。
原因很土。身体不一样。手指数量、关节结构、力反馈、抓握方式,都不一样。
Genesis 的解法也很直接:既然要学人,就让机器人的执行端更像人。
这不是小改动。很多机器人公司长期使用两指夹爪,是因为它简单、耐用、便宜。仿人手看起来更灵巧,也更难维护、更难量产、更难校准。
所以,关注具身智能的读者不该只看视频里的动作漂不漂亮。更该看 Genesis 是否真的降低了人类动作数据到机器人动作之间的转换损耗。
如果损耗没降下来,仿人手只是贵一点的舞台道具。
真正的赌注,是把工人的手变成训练数据
Genesis 这套系统最关键的部分,不是机械手单点能力,而是“手 + 手套 + 视频 + 仿真”的组合。
它做了一款带传感器的数据手套。公司说这款手套足够轻,类似很多行业已经使用的安全手套。实验室、制造、医药等岗位的工人,可以在日常工作中佩戴。
再配合第一视角视频,系统就能采集人类完成复杂任务的过程。
这才是 Genesis 想搭的数据飞轮。
| 环节 | 作用 | 硬约束 |
|---|---|---|
| 仿人机械手 | 让机器人执行端更接近人手 | 制造、维护、耐用性更难 |
| 数据手套 | 采集真实操作轨迹 | 工人是否愿意戴,补偿怎么定 |
| 第一视角视频 | 记录环境、工具和动作上下文 | 隐私、保密、数据归属 |
| 仿真系统 | 加快模型评估和迭代 | 仿真表现不等于现实稳定 |
机器人行业最缺的不是漂亮任务,而是可规模化、可复用、可授权的真实操作数据。
语言模型可以吃互联网文本。机器人不行。物理世界要采,要标,要对齐,还要承担设备损耗和安全风险。
Genesis 这一步是聪明的。它没有只喊“更大的模型”,而是去碰数据源。
但也正因为碰到了数据源,麻烦才真正开始。
工人戴着手套和摄像头工作,采集出来的数据,可能被用来训练未来替代自己的机器人。这里有一个很朴素的问题:谁得利,谁付代价?
目前这部分还没看清。报道里,Genesis 没有给出确定的补偿机制和数据归属安排。创始团队承认,相关细节可能由客户和员工之间处理;客户也可能不把数据共享给 Genesis。公司还可以找第三方伙伴付费采集数据,但那又回到成本问题。
“天下熙熙,皆为利来。”这句话放在这里很准。
机器人数据不是凭空长出来的。它来自具体岗位、具体工人的身体经验。要让飞轮转起来,激励设计比演示视频更关键。
这对两类人影响最直接。
对机器人创业者来说,纯模型叙事会越来越不够用。团队要么补硬件和数据采集能力,要么找更强的硬件、场景伙伴。只会调模型,不碰现场,后面会越来越难讲清壁垒。
对早期投资人来说,尽调重点也该往前挪。别只问模型多大、demo 多顺。要问数据从哪来,谁授权,谁付钱,工人是否有补偿,客户是否愿意共享,失败率能不能被记录和复盘。
投机器人基础模型,投的不是一段视频。投的是数据生产关系。
全栈可能更接近真问题,但不是捷径
我倾向于认为,机器人基础模型公司迟早都要更深地碰硬件。
原因很简单:语言模型的输入输出相对统一,机器人不是。
不同机械臂、夹爪、传感器、工作台、工具、材料,都会改变任务本身。只做模型,很容易卡在“看起来通用,落地时到处适配”的泥潭里。
Genesis 选择全栈,是为了控制变量。手、手套、模型、仿真评估一起做,确实更像一条闭环路线。
它和 Physical Intelligence、Skild AI 的差异也在这里:Genesis 更早把硬件纳入核心系统,而不是把自己限定在模型层。
但全栈不是魔法词。
软件公司喜欢说全栈,因为听起来像控制力。硬件公司知道,全栈还意味着库存、供应链、返修、校准、现场维护、客户培训,以及一堆模型团队不爱碰的脏活。
机器人也不是 App。错一次,不是页面卡顿。可能是打碎器皿、污染样本、划伤工件,甚至伤人。
实验室操作看起来比魔方更接近商业场景。但它对稳定性、合规和责任边界的要求也更高。
所以我不会因为这支视频就说 Genesis 已经跑通商业化。现在更准确的说法是:它展示了一条更完整、也更昂贵的路线。公司仍处在展示和客户洽谈阶段,还没有拿出公开基准、真实工厂部署数据和失败率。
接下来最该看四件事:
- 数据手套能否在真实岗位长期佩戴,而不是短期试验。
- 工人补偿和数据归属是否被写进机制,而不是留给客户私下处理。
- 仿真评估能否预测现实失败,而不是只服务演示迭代。
- 客户是否愿意把高价值操作数据共享给 Genesis。
这几件事,比 GENE-26.5 的名字更重要。
扯远一点,今天的机器人数据有点像早期工业化里的工艺经验。机器要替代手艺,先要吞下手艺。问题是,过去的手艺常常被工厂制度吸走,手艺人未必分到后来的收益。
今天不完全一样。数据授权、劳动关系、企业保密都更复杂。但旧问题还在:人的经验如何变成公司的资产,谁来定价,谁来分账。
这才是 Genesis 这条路线最尖锐的地方。
如果它真能把工人的日常操作转化成可训练、可迁移、可持续更新的人类技能库,它会比单纯堆模型参数的公司更接近机器人商业化。
反过来,如果激励和落地算不过账,仿人手越精巧,越像一件昂贵展品。
回到开头那只会做饭、弹琴、拧魔方的手。它最值得看的地方,不是灵巧,而是贪心。
Genesis 想抓住的不只是物体,而是机器人时代最稀缺的生产资料:人的动作。